polyora/visual_database.cpp File Reference
#include "visual_database.h"#include <algorithm>#include <iostream>
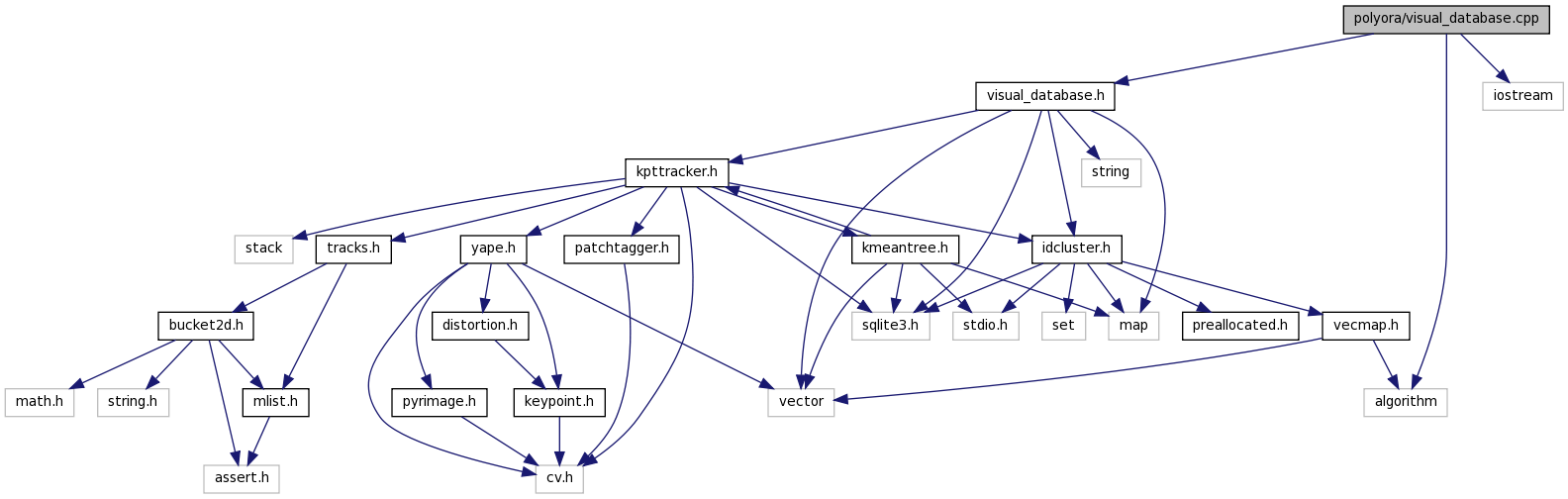
Include dependency graph for visual_database.cpp:
Go to the source code of this file.
Classes | |
| struct | zint |
Functions | |
| visual_object * | query_frame (id_cluster_collection &db, pyr_frame *frame, float *score) |
| void | update_query_with_frame (incremental_query &query, kpt_tracker *tracker) |
| void | init_query_with_frame (incremental_query &query, pyr_frame *frame) |
Function Documentation
| visual_object* query_frame | ( | id_cluster_collection & | db, | |
| pyr_frame * | frame, | |||
| float * | score | |||
| ) |
Definition at line 71 of file visual_database.cpp.
References id_cluster::add(), bucket2d< T >::begin(), pyr_keypoint::cid, id_cluster_collection::get_best_cluster(), and tframe::points.
